I am looking into some regex work, and I ran into a performance problem. I need to run a particular regex over a large number (millions) of strings. That caused my spidey sense to… tingle.
The code in question looked something like this:
long matches =CountMatchingEntries(newRegex(@"\s+user id\s+"));
Creating a regex for each invocation is… expensive. That is why we have the RegexOptions.Compiledflag, after all. And the Regex class is thread-safe, so I did the equivalent of this code:
// class levelstaticRegex s_regex =newRegex(@"\s+user id\s+", RegexOptions.Compiled);// inside a methodlong matches =CountMatchingEntries(s_regex);
The performance of the system immediately took a big, stinking performance regression all over my benchmarks. At first, I was sure that I wasn’t doing something properly, so I re-wrote this using the modern approach, with source generators, like this:
That had the exact same behavior, a major performance regression.
We are talking about this making the code six times slower. That is a huge cost for something that every fiber in my being tells me should be faster. As I started digging into things, I managed to reproduce this in an isolated manner.
The following benchmark shows the core of the problem:
usingSystem.Diagnostics;usingSystem.Text.RegularExpressions;var lines = Enumerable.Range(0,100_000).Select(i =>$"The user id #{i}").ToArray();var regex =newRegex(@"\s+user id\s+", RegexOptions.Compiled | RegexOptions.CultureInvariant | RegexOptions.IgnoreCase);// This is fastExec(()=> lines.Count(l => regex.IsMatch(l)));// This is slowExec(()=> lines.AsParallel().Count(l => regex.IsMatch(l)));staticvoidExec(Func<int> run){var before = GC.GetTotalAllocatedBytes();var sw = Stopwatch.StartNew();//var count = lines.AsParallel().Count(l => MyClass.UserIdRegex().IsMatch(l));var count =run();
sw.Stop();var after = GC.GetTotalAllocatedBytes();
Console.WriteLine($"Count: {count}, Time: {sw.ElapsedMilliseconds} ms, Memory: {after - before} bytes");}
I create the sameRegex instance and run it 100,000 times. The first time, I do that using a single thread, and the second time I’m using multiple threads.
The only difference between those runs is the addition of AsParallel() to force it to use multiple threads. My code isn’t actually using this or explicit threads, but it is using a single cached Regex instance in a web environment, so under load, it is being used concurrently.
What is going on here? The parallel code is much slower because it allocates. It turns out that deep in the guts of .NET’s Regex engine we have this block of code:
RegexRunner runner = Interlocked.Exchange(ref _runner,null)??CreateRunner();try{// do work}finally{
_runner = runner;}
In other words, the actual RegexRunner needs to keep some mutable state, which doesn’t play nicely with threads. In order to maintain itself under concurrent usage, the Regex “checks out” the instance when it is being used, so it can be the sole owner.
Other callers on the same instance at the same time will allocate a new runner instance. That is what is causing the massive slowdown. If we are using the Regex instance in a single-threaded manner, the code will check it in & out as needed, with zero allocations and quite fast.
If you are using that from concurrent code, you’ll allocate like crazy and can expect your performance to drop by as much as five times.
I created an issue for that, since I believe this is quite a tripping hazard in terms of performance.
The current fix that I found was to use ThreadLocal<Regex> for this, ensuring that there is no actual concurrent usage, at the cost of higher memory usage and repeated initializations.
RavenDB 7.0 introduces vector search using the Hierarchical Navigable Small World (HNSW) algorithm, a graph-based approach for Approximate Nearest Neighbor search. HNSW enables efficient querying of large vector datasets but requires random access to the entire graph, making it memory-intensive.
HNSW's random read and insert operations demand in-memory processing. For example, inserting 100 new items into a graph of 1 million vectors scatters them randomly, with no efficient way to sort or optimize access patterns. That is in dramatic contrast to the usual algorithms we can employ (B+Tree, for example), which can greatly benefit from such optimizations.
Let’s assume that we deal with vectors of 768 dimensions, or 3KB each. If we have 30 million vectors, just the vector storage is going to take 90GB of memory. Inserts into the graph require us to do effective random reads (with no good way to tell what those would be in advance). Without sufficient memory, performance degrades significantly due to disk swapping.
The rule of thumb for HNSW is that you want at least 30% more memory than the vectors would take. In the case of 90GB of vectors, the minimum required memory is going to be 128GB.
Cost reduction
You can also use quantization (shrinking the size of the vector with some loss of accuracy). Going to binary quantization for the same dataset requires just 3GB of space to store the vectors. But there is a loss of accuracy (may be around 20% loss).
We tested RavenDB’s HNSW implementation on a 32 GB machine with a 120 GB vector index (and no quantization), simulating a scenario with four times more data than available memory.
This is an utterly invalid scenario, mind you. For that amount of data, you are expected to build the HNSW index on a machine with 192GB. But we wanted to see how far we could stress the system and what kind of results we would get here.
The initial implementation stalled due to excessive memory use and disk swapping, rendering it impractical. Basically, it ended up doing a page fault on each and every operation, and that stalled forward progress completely.
Optimization Approach
Optimizing for such an extreme scenario seemed futile, this is an invalid scenario almost by definition. But the idea is that improving this out-of-line scenario will also end up improving the performance for more reasonable setups.
When we analyzed the costs of HNSW in a severely memory-constrained environment, we found that there are two primary costs.
Distance computations: Comparing vectors (e.g., cosine similarity) is computationally expensive.
Random vector access: Loading vectors from disk in a random pattern is slow when memory is insufficient.
Distance computation is doing math on two 3KB vectors, and on a large graph (tens of millions), you’ll typically need to run between 500 - 1,500 distance comparisons. To give some context, adding an item to a B+Tree of the same size will have fewer than twenty comparisons (and highly localized ones, at that).
That means reading about 2MB of data per insert on average. Even if everything is in memory, you are going to be paying a significant cost here in CPU cycles. If the data does not reside in memory, you have to fetch it (and it isn’t as neat as having a single 2MB range to read, it is scattered all over the place, and you need to traverse the graph in order to find what you need to read).
To address this issue, we completely restructured how we go about inserting nodes into the graph. We avoid serial execution and instead spawn multiple insert processes at the same time. Interestingly enough, we are single-threaded in this regard. We extract from the process the parts where it does the distance computation and loads the vectors.
Each process will run the algorithm until it reaches the stage where it needs to run distance computation on some vectors. In that case, it will yield to another process and let it run. We keep doing this until we have no more runnable processes to execute.
We can then scan the list of nodes that we need to process (run distance computation on all their edges), and we can then:
Gather all vectors needed for graph traversal.
Preload them from disk efficiently.
Run distance computations across multiple threads simultaneously.
The idea here is that we save time by preloading data efficiently. Once the data is loaded, we throw all the distance computations per node to the thread pool. As soon as any of those distance computations are done, we resume the stalled process for it.
The idea is that at any given point in time, we have processes moving forward or we are preloading from the disk, while at the same time we have background threads running to compute distances.
This allows us to make maximum use of the hardware. Here is what this looks like midway through the process:
As you can see, we still have to go to the disk a lot (no way around that with a working set of 120GB on a 32GB machine), but we are able to make use of that efficiently. We always have forward progress instead of just waiting.
Don’ttry this on the cloud - most cloud instances have a limited amount of IOPS to use, and this approach will burn through any amount you have quickly. We are talking about roughly 15K - 20K IOPS on a sustained basis. This is meant for testing in adverse conditions, on hardware that is utterly unsuitable for the task at hand. A machine with the proper amount of memory will not have to deal with this issue.
While still slow on a 32 GB machine due to disk reliance, this approach completed indexing 120 GB of vectors in about 38 hours (average rate of 255 vectors/sec). To compare, when we ran the same thing on a 64GB machine, we were able to complete the indexing process in just over 14 hours (average rate of 694 vectors/sec).
Accuracy of the results
When inserting many nodes in parallel to the graph, we risk a loss of accuracy. When we insert them one at a time, nodes that are close together will naturally be linked to one another. But when running them in parallel, we may “miss” those relations because the two nodes aren’t yet discoverable.
To mitigate that scenario, we preemptively link all the in-flight nodes to each other, then run the rest of the algorithm. If they are not close to one another, these edges will be pruned. It turns out that this behavior actually increased the overall accuracy (by about 1%) compared to the previous behavior. This is likely because items that are added at the same time are naturally linked to one another.
Results
On smaller datasets (“merely” hundreds of thousands of vectors) that fit in memory, the optimizations reduced indexing time by 44%! That is mostly because we now operate in parallel and have more optimized I/O behavior.
We are quite a bit faster, we are (slightly) more accurate, and we also have reasonable behavior when we exceed the system limits.
What about binary quantization?
I mentioned that binary quantization can massively reduce the amount of space required for vector search. We also ran tests with the same dataset using binary quantization. The total size of all the vectors was around 3GB, and the total index size (including all the graph nodes, etc.) was around 18 GB. That took under 5 hours to index on the same 32GB machine.
If you care to know what it is that we are doing, take a look at the Hnsw.Parallel file inside the repository. The implementation is quite involved, but I’m really proud of how it turned out in the end.
A major performance cost for this sort of operation is the allocation cost. We allocate a separate hash set for each node in the graph, and then allocate whatever backing store is needed for it. If you have a big graph with many connections, that is expensive.
This means that we have almost no allocations for the entire operation, yay!
This function also performs significantly worse than the previous one, even though it barely allocates. The reason for that? The call to Clear() is expensive. Take a look at the implementation - this method needs to zero out two arrays, and it will end up being as large as the node with the most reachable nodes. Let’s say we have a node that can access 10,000 nodes. That means that for each node, we’ll have to clear an array of about 14,000 items, as well as another array that is as big as the number of nodes we just visited.
No surprise that the allocating version was actually cheaper. We use the visited set for a short while, then discard it and get a new one. That means no expensive Clear() calls.
The question is, can we do better? Before I answer that, let’s try to go a bit deeper in this analysis. Some of the main costs in HashSet<Node> are the calls to GetHashCode() and Equals(). For that matter, let’s look at the cost of the Neighbors array on the Node.
Let’s assume each node has about 10 - 20 neighbors. What is the cost in memory for each option? Node1 uses references (pointers), and will take 256 bytes just for the Neighbors backing array (32-capacity array x 8 bytes). However, the Node2 version uses half of that memory.
This is an example of data-oriented design, and saving 50% of our memory costs is quite nice. HashSet<int> is also going to benefit quite nicely from JIT optimizations (no need to call GetHashCode(), etc. - everything is inlined).
We still have the problem of allocations vs. Clear(), though. Can we win?
Now that we have re-framed the problem using int indexes, there is a very obvious optimization opportunity: use a bit map (such as BitsArray). We know upfront how many items we have, right? So we can allocate a single array and set the corresponding bit to mark that a node (by its index) is visited.
That dramatically reduces the costs of tracking whether we visited a node or not, but it does not address the costs of clearing the bitmap.
The idea is pretty simple, in addition to the bitmap - we also have another array that marks the version of each 64-bit range. To clear the array, we increment the version. That would mean that when adding to the bitmap, we reset the underlying array element if it doesn’t match the current version. Once every 64K items, we’ll need to pay the cost of actually resetting the backing stores, but that ends up being very cheap overall (and worth the space savings to handle the overflow).
The code is tight, requires no allocations, and performs very quickly.
I ran into an interesting post, "Sharding Pgvector," in which PgDog (provider of scaling solutions for Postgres) discusses scaling pgvector indexes (HNSW and IVFFlat) across multiple machines to manage large-scale embeddings efficiently. This approach speeds up searches and improves recall by distributing vector data, addressing the limitations of fitting large indexes into memory on a single machine.
That was interesting to me because they specifically mention this Wikipedia dataset, consisting of 35.1 million vectors. That… is not really enough to justify sharding, in my eyes. The dataset is about 120GB of Parquet files, so I threw that into RavenDB using the following format:
Each vector has 768 dimensions in this dataset.
33 minutes later, I had the full dataset in RavenDB, taking 163 GB of storage space. The next step was to define a vector search index, like so:
from a in docs.Articles
select new
{
Vector = CreateVector(a.Embedding)
}
That index (using the HNSW algorithm) is all that is required to start doing proper vector searches in RavenDB.
Here is what this looks like - we have 163GB for the raw data, and the index itself is 119 GB.
RavenDB (and PgVector) actually need to store the vectors twice - once in the data itself and once in the index.
Given the size of the dataset, I used a machine with 192 GB of RAM to create the index. Note that this still means the total data size is about ⅓ bigger than the available memory, meaning we cannot compute it all in memory.
This deserves a proper explanation - HNSW is a graph algorithm that assumes you can cheaply access any part of the graph during the indexing process. Indeed, this is effectively doing pure random reads on the entire dataset. You would generally run this on a machine with at least 192 GB of RAM. I assume this is why pgvector required sharding for this dataset.
I decided to test it out on several different machines. The key aspect here is the size of memory, I’m ignoring CPU counts and type, they aren’t the bottleneck for this scenario. As a reminder, we are talking about a total data size that is close to 300 GB.
RAM
RavenDB indexing time:
192 GB
2 hours, 20 minutes
64 GB
14 hours, 8 minutes
32 GB
37 hours, 40 minutes
Note that all of those were run on a single machine, all using local NVMe disk. And yes, that is less than two days to index that much data on a machine that is grossly inadequate for it.
I should note that on the smaller machines, query times are typically ~5ms, so even with a lot of data indexed, the actual search doesn’t need to run on a machine with a lot of memory.
In short, I don’t see a reason why you would need to use sharding for that amount of data. It can comfortably fit inside a reasonably sized machine, with room to spare.
I should also note that the original post talks about using the IVFFlat algorithm instead of HNSW. Pgvector supports both, but RavenDB only uses HNSW. From a technical perspective, I would love to be able to use IVFFlat, since it is a much more traditional algorithm for databases.
You run k-means over your data to find the centroids (so you can split the data into reasonably sized chunks), and then just do an efficient linear search on that small chunk as needed. It fits much more nicely into the way databases typically work. However, it also has some significant drawbacks:
You have to have the data upfront, you cannot build it incrementally.
The effectiveness of the IVFFlat index degrades over time with inserts & deletes, because the original centroids are no longer as accurate.
Because of those reasons, we didn’t implement that. HNSW is a far more complex algorithm, both in terms of the actual approach and the number of hoops we had to go through to implement that efficiently, but as you can see, it is able to provide good results even on large datasets, can be built incrementally and doesn’t degrade over time.
Head-to-head comparison
I decided to run pgvector and RavenDB on the same dataset to get some concrete ideas about their performance. Because I didn’t feel like waiting for hours, I decided to use this dataset. It has 485,859 vectors and about 1.6 GB of data.
RavenDB indexed that in 1 minute and 17 seconds. My first attempt with pgvector took over 7 minutes when setting maintenance_work_mem = '512MB'. I had to increase it to 2GB to get more reasonable results (and then it was 1 minute and 49 seconds).
RavenDB is able to handle it a lot better when there isn’t enough memory to keep it all in RAM, while pgvector seems to degrade badly.
Summary
In short, I don’t think that you should need to go for sharding (and its associated complexity) for that amount of data. And I say that as someone whose database has native sharding capabilities.
For best performance, you should run large vector indexes on machines with plenty of RAM, but even without that, RavenDB does an okay job of keeping things ticking.
We recently tackled performance improvements for vector search in RavenDB. The core challenge was identifying performance bottlenecks. Details of specific changes are covered in a separate post. The post is already written, but will be published next week, here is the direct link to that.
In this post, I don’t want to talk about the actual changes we made, but the approach we took to figure out where the cost is.
Take a look at the following flame graph, showing where our code is spending the most time.
As you can see, almost the entire time is spent computing cosine similarity. That would be the best target for optimization, right?
I spent a bunch of time writing increasingly complicated ways to optimize the cosine similarity function. And it worked, I was able to reduce the cost by about 1.5%!
That is something that we would generally celebrate, but it was far from where we wanted to go. The problem was elsewhere, but we couldn’t see it in the profiler output because the cost was spread around too much.
Our first task was to restructure the code so we could actually see where the costs were. For instance, loading the vectors from disk was embedded within the algorithm. By extracting and isolating this process, we could accurately profile and measure its performance impact.
This restructuring also eliminated the "death by a thousand cuts" issue, making hotspots evident in profiling results. With clear targets identified, we can now focus optimization efforts effectively.
That major refactoring had two primary goals. The first was to actually extract the costs into highly visible locations, the second had to do with how you address them. Here is a small example that scans a social graph for friends, assuming the data is in a file.
def read_user_friends(file, user_id: int)-> List[int]:"""Read friends for a single user ID starting at indexed offset."""
pass # redacted
def social_graph(user_id: int, max_depth: int)-> Set[int]:if max_depth <1:return set()
all_friends = set()
visited ={user_id}
work_list = deque([(user_id, max_depth)])
with open("relations.dat","rb") as file:while work_list:
curr_id, depth = work_list.popleft()if depth <=0:continuefor friend_id in read_user_friends(file, curr_id):if friend_id not in visited:
all_friends.add(friend_id)
visited.add(friend_id)
work_list.append((friend_id, depth -1))return all_friends
If you consider this code, you can likely see that there is an expensive part of it, reading from the file. But the way the code is structured, there isn’t really much that you can do about it. Let’s refactor the code a bit to expose the actual costs.
def social_graph(user_id: int, max_depth: int)-> Set[int]:if max_depth <1:return set()
all_friends = set()
visited ={user_id}
with open("relations.dat","rb") as file:
work_list = read_user_friends(file,[user_id])while work_list and max_depth >=0:
to_scan = set()for friend_id in work_list:# gather all the items to readif friend_id in visited:continue
all_friends.add(friend_id)
visited.add(friend_id)
to_scan.add(curr_id)# read them all in one shot
work_list = read_users_friends(file, to_scan)# reduce for next call
max_depth = max_depth -1return all_friends
Now, instead of scattering the reads whenever we process an item, we gather them all and then send a list of items to read all at once. The costs are far clearer in this model, and more importantly, we have a chance to actually do something about it.
Optimizing a lot of calls to read_user_friends(file, user_id) is really hard, but optimizing read_users_friends(file, users) is a far simpler task. Note that the actual costs didn’t change because of this refactoring, but the ability to actually make the change is now far easier.
Going back to the flame graph above, the actual cost profile differs dramatically as the size of the data rose, even if the profiler output remained the same. Refactoring the code allowed us to see where the costs were and address them effectively.
Here is the end result as a flame graph. You can clearly see the preload section that takes a significant portion of the time. The key here is that the change allowed us to address this cost directly and in an optimal manner.
The end result for our benchmark was:
Before: 3 minutes, 6 seconds
After: 2 minutes, 4 seconds
So almost exactly ⅓ of the cost was removed because of the different approach we took, which is quite nice.
This technique, refactoring the code to make the costs obvious, is a really powerful one. Mostly because it is likely the first step to take anyway in many performance optimizations (batching, concurrency, etc.).
I commented that we should move the Increment() operation outside of the loop because if two threads are calling Register() at the same time, we’ll have a lot of contention here.
The reply was that this was intentional since calling Interlocked.CompareExchange() to do the update in a batch manner is more complex. The issue was a lack of familiarity with the Interlocked.Add() function, which allows us to write the function as:
Both options have essentially the same exact performance characteristics, but if we need to register a large batch of items, the second option drastically reduces the contention.
In this case, we don’t actually care about having an accurate count as items are added, so there is no reason to avoid the optimization.
I care about the performance of RavenDB. Enough that I would go to epic lengths to fix them. Here I use “epic” both in terms of the Agile meaning of multi-month journeys and the actual amount of work required. See my recent posts about RavenDB 7.1 I/O work.
There hasn’t been a single release in the past 15 years that didn’t improve the performance of RavenDB in some way. We have an entire team whose sole task is to find bottlenecks and fix them, to the point where assembly language is a high-level concept at times (yes, we design some pieces of RavenDB with CPU microcode for performance).
When we ran into this issue, I was… quite surprised, to say the least. The problem was that whenever we serialized a document in RavenDB, we would compile some LINQ expressions.
That is expensive, and utterly wasteful. That is the sort of thing that we should never do, especially since there was no actual need for it.
Here is the essence of this fix:
We ran a performance test on the before & after versions, just to know what kind of performance we left on the table.
Before (ms)
After (ms)
33,782
20
The fixed version is 1,689 times faster, if you can believe that.
So here is a fix that is both great to have and quite annoying. We focused so much effort on optimizing the server, and yet we missed something that obvious? How can that be?
Well, the answer is that this isn’t an actual benchmark. The problem is that this code is invoked per instance created instead of globally, and it is created once per thread. In any situation where the number of threads is more or less fixed (most production scenarios, where you’ll be using a thread pool, as well as in most benchmarks), you are never going to see this problem.
It is when you have threads dying and being created (such as when you handle spikes) that you’ll run into this issue. Make no mistake, it is an actual issue. When your load spikes, the thread pool will issue new threads, and they will consume a lot of CPU initially for absolutely no reason.
In short, we managed to miss this entirely (the code dates to 2017!) for a long time. It never appeared in any benchmark. The fix itself is trivial, of course, and we are unlikely to be able to show any real benefits from it in a benchmark, but that is yet another step in making RavenDB better.
Update: 2026-07-13 - I originally wrote this in early 2025 intended for RavenDB 7.1. It turns out that we got higher priorities (a whole new set of AI features) that pushed this to RavenDB 8.0.
One of the more interesting developments in terms of kernel API surface is the IO Ring. On Linux, it is called IO Uring and Windows has copied it shortly afterward. The idea started as a way to batch multiple IO operations at once but has evolved into a generic mechanism to make system calls more cheaply. On Linux, a large portion of the kernel features is exposed as part of the IO Uring API, while Windows exposes a far less rich API (basically, just reading and writing).
The reason this matters is that you can use IO Ring to reduce the cost of making system calls, using both batching and asynchronous programming. As such, most new database engines have jumped on that sweet nectar of better performance results.
As part of the overall re-architecture of how Voron manages writes, we have done the same. I/O for Voron is typically composed of writes to the journals and to the data file, so that makes it a really good fit, sort of.
An ironic aspect of IO Uring is that despite it being an asynchronous mechanism, it is inherently single-threaded. There are good reasons for that, of course, but that means that if you want to use the IO Ring API in a multi-threaded environment, you need to take that into account.
A common way to handle that is to use an event-driven system, where all the actual calls are generated from a single “event loop” thread or similar. This is how the Node.js API works, and how .NET itself manages IO for sockets (there is a single thread that listens to socket events by default).
The whole point of IO Ring is that you can submit multiple operations for the kernel to run in as optimal a manner as possible. Here is one such case to consider, this is the part of the code where we write the modified pages to the data file:
using (fileHandle){for(int i =0; i <pages.Length; i++){
int numberOfPages = pages[i].GetNumberOfPages();var size = numberOfPages *Constants.Storage.PageSize;var offset = pages[i].PageNumber *Constants.Storage.PageSize;var span =newSpan<byte>(pages[i].Pointer, size);RandomAccess.Write(fileHandle, span, offset);
written += numberOfPages *Constants.Storage.PageSize;}}
It issues a separate system call per page (and there may be thousands of pages modified).
It must wait until the entire set of pages is successfully written before we can return to the caller.
Note that this particular code is making no assumptions about the durability of those writes. That part is handled in another location entirely.
Moving this to IO Ring means that we can submit the entire set of writes in one shot, then let the kernel sort out exactly how it wants to deal with it. We still have to wait until the entire process is completed, but unlike the previous code, we don’t have to wait for each operation individually, just for the whole thing.
The first version of IO Ring usage inside RavenDB had a separate ring for each data file we used. The reasoning behind this is that the IO Ring API is inherently a single-threaded concept and is not suitable for writing from multiple threads. That limitation is true even if you are writing to separate files, mind.
When we tested it out, we encountered an… interesting behavior. Looking at the RavenDB process, there were a lot of threads that we weren’t familiar with, like:
Actually, those aren’t threads in the normal sense. Those are kernel tasks, generated by the IO Ring at the kernel level directly. It turns out that internally, IO Ring may spawn worker threads to do the async work at the kernel level. When we had a separate IO Ring per file, each one of them had its own pool of threads to do the work.
The way it usually works is really interesting. The IO Ring will attempt to complete the operation in a synchronous manner. For example, if you are writing to a file and doing buffered writes, we can just copy the buffer to the page pool and move on, no actual I/O took place. So the IO Ring will run through that directly in a synchronous manner.
However, if your operation requires actual blocking, it will be sent to a worker queue to actually execute it in the background. This is one way that the IO Ring is able to complete many operations so much more efficiently than the alternatives.
In our scenario, we have a pretty simple setup, we want to write to the file, making fully buffered writes. At the very least, being able to push all the writes to the OS in one shot (versus many separate system calls) is going to reduce our overhead. More interesting, however, is that eventually, the OS will want to start writing to the disk, so if we write a lot of data, some of the requests will be blocked. At that point, the IO Ring will switch them to a worker thread and continue executing.
The problem we had was that when we had a separate IO Ring per data file and put a lot of load on the system, we started seeing contention between the worker threads across all the files. Basically, each ring had its own separate pool, so there was a lot of work for each pool but no sharing.
If the IO Ring is single-threaded, but many separate threads lead to wasted resources, what can we do? The answer is simple, we’ll use a single global IO Ring and manage the threading concerns directly.
Here is the setup code for that (I removed all error handling to make it clearer):
void*do_ring_work(void*arg){
int rc;if(g_cfg.low_priority_io){syscall(SYS_ioprio_set, IOPRIO_WHO_PROCESS,0,IOPRIO_PRIO_VALUE(IOPRIO_CLASS_BE,7));}pthread_setname_np(pthread_self(),"Rvn.Ring.Wrkr");
struct io_uring *ring =&g_worker.ring;
struct workitem *work = NULL;while(true){do{// wait for any writes on the eventfd // completion on the ring (associated with the eventfd)
eventfd_t v;
rc =read(g_worker.eventfd,&v,sizeof(eventfd_t));}while(rc <0&& errno == EINTR);
bool has_work =true;while(has_work){
int must_wait =0;
has_work =false;if(!work){// we may have _previous_ work to run through
work =atomic_exchange(&g_worker.head,0);}while(work){
has_work =true;
struct io_uring_sqe *sqe =io_uring_get_sqe(ring);if(sqe == NULL){
must_wait =1;
goto sumbit_and_wait;// will retry}io_uring_sqe_set_data(sqe, work);switch(work->type){case workitem_fsync:io_uring_prep_fsync(sqe, work->filefd, IORING_FSYNC_DATASYNC);break;case workitem_write:io_uring_prep_writev(sqe, work->filefd, work->op.write.iovecs,
work->op.write.iovecs_count, work->offset);break;default:break;}
work = work->next;}
sumbit_and_wait:
rc = must_wait ?io_uring_submit_and_wait(ring, must_wait):io_uring_submit(ring);
struct io_uring_cqe *cqe;
uint32_t head =0;
uint32_t i =0;io_uring_for_each_cqe(ring, head, cqe){
i++;// force another run of the inner loop, // to ensure that we call io_uring_submit again
has_work =true;
struct workitem *cur =io_uring_cqe_get_data(cqe);if(!cur){// can be null if it is:// * a notification about eventfd writecontinue;}switch(cur->type){case workitem_fsync:notify_work_completed(ring, cur);break;case workitem_write:if(/* partial write */){// queue againcontinue;}notify_work_completed(ring, cur);break;}}io_uring_cq_advance(ring, i);}}return0;}
The IO Ring itself
An eventfd() that we associate with the IO Ring
A dedicated (user) worker thread
In Linux, you can use eventfd as a signaling mechanism. This is similar to events in Windows. When you associate the IO Ring with the eventfd, it will increment the event whenever an operation (or multiple operations!) is completed.
Let’s look at what the actual worker thread does, again, with all error handling omitted. (With error handling, this single function is close to 200 lines long, phew!). Skip past the code for an explanation of what is going on here.
We start by checking if we want to use lower-priority I/O, this is because we don’t actually care how long those operations take. The purpose of writing the data to the disk is that it will reach it eventually. RavenDB has two types of writes:
Journal writes (durable update to the write-ahead log, required to complete a transaction).
Data flush / Data sync (background updates to the data file, currently buffered in memory, no user is waiting for that)
As such, we are fine with explicitly prioritizing the journal writes (which users are waiting for) in favor of all other operations.
What is this C code? I thought RavenDB was written in C#
RavenDB is written in C#, but for very low-level system details, we found that it is far easier to write a Platform Abstraction Layer to hide system-specific concerns from the rest of the code. That way, we can simply submit the data to write and have the abstraction layer take care of all of that for us. This also ensures that we amortize the cost of PInvoke calls across many operations by submitting a big batch to the C code at once.
After setting the IO priority, we start reading from what is effectively a thread-safe queue. We wait for eventfd() to signal that there is work to do, and then we grab the head of the queue and start running.
The idea is that we fetch items from the queue, then we write those operations to the IO Ring as fast as we can manage. The IO Ring size is limited, however. So we need to handle the case where we have more work for the IO Ring than it can accept. When that happens, we will go to the submit_and_wait label and wait for something to complete.
Note that there is some logic there to handle what is going on when the IO Ring is full. We submit all the work in the ring, wait for an operation to complete, and in the next run, we’ll continue processing from where we left off.
The rest of the code is processing the completed operations and reporting the result back to their origin. This is done using the following function, which I find absolutely hilarious:
Remember that when we submit writes to the data file, we must wait until they are all done. The async nature of IO Ring is meant to help us push the writes to the OS as soon as possible, as well as push writes to multiple separate files at once. For that reason, we use anothereventfd() to wait (as the submitter) for the IO Ring to complete the operation. I love the code above because it is actually using the IO Ring itself to do the work we need to do here, saving us an actual system call in most cases.
Here is how we submit the work to the worker thread:
This function handles the submission of a set of pages to write to a file. Note that we protect against concurrent work on the same file. That isn’t actually needed since the caller code already handles that, but an uncontended lock is cheap, and it means that I don’t need to think about concurrency or worry about changes in the caller code in the future.
We ensure that we have sufficient buffer space, and then we create a work item. A work item is a single write to the file at a given location. However, we are using vectored writes, so we’ll merge writes to the consecutive pages into a single write operation. That is the purpose of the huge for loop in the code. The pages arrive already sorted, so we just need to do a single scan & merge for this.
Pay attention to the fact that the struct workitem actually belongs to two different linked lists. We have the next pointer, which is used to send work to the worker thread, and the prev pointer, which is used to iterate over the entire set of operations we submitted on completion (we’ll cover this in a bit).
It is important to note that the worker node is going to grab this result and set the head to NULL, which means that it grabs all pending work items in one shot rather than having to contend with the threads submitting work on each item in the queue.
Another thing to note is that this does not wake the worker thread. Instead, we submit all the work to the worker thread and then wait for it to complete using this code:
The idea is pretty simple. We first wake the worker thread by writing to its eventfd(), and then we wait on our own eventfd() for the worker to signal us that (at least some) of the work is done.
Note that we handle the submission of multiple work items by iterating over them in reverse order, using the prev pointer. Only when all the work is done can we return to our caller.
The end result of all this behavior is that we have a completely new way to deal with background I/O operations (remember, journal writes are handled differently). We can control both the volume of load we put on the system by adjusting the size of the IO Ring as well as changing its priority.
The fact that we have a single global IO Ring means that we can get much better usage out of the worker thread pool that IO Ring utilizes. We also give the OS a lot more opportunities to optimize RavenDB’s I/O.
The code in this post shows the Linux implementation, but RavenDB also supports IO Ring on Windows if you are running a recent edition.
We aren’t done yet, mind, I still have more exciting things to tell you about how RavenDB 7.18.0 is optimizing writes and overall performance. In the next post, we’ll discuss what I call the High Occupancy Lane vs. Critical Lane for I/O and its impact on our performance.
Update: 2026-07-13 - I originally wrote this in early 2025 intended for RavenDB 7.1. It turns out that we got higher priorities (a whole new set of AI features) that pushed this to RavenDB 8.0.
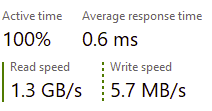
I wrote before about a surprising benchmark that we ran to discover the limitations of modern I/O systems. Modern disks such as NVMe have impressive capacity and amazing performance for everyday usage. When it comes to the sort of activities that a database engine is interested in, the situation is quite different.
At the end of the day, a transactional database cares a lot about actually persisting the data to disk safely. The usual metrics we have for disk benchmarks are all about buffered writes, that is why we run our own benchmark. The results were really interesting (see the post), basically, it feels like there is a bottleneck writing to the disk. The bottleneck is with the number of writes, not how big they are.
If you are issuing a lot of small writes, your writes will contend on that bottleneck and you’ll see throughput that is slow. The easiest way to think about it is to consider a bus carrying 50 people at once versus 50 cars with one person each. The same road would be able to transport a lot more people with the bus rather than with individual cars, even though the bus is heavier and (theoretically, at least) slower.
Databases & Storages
In this post, I’m using the term Storage to refer to a particular folder on disk, which is its own self-contained storage with its own ACID transactions. A RavenDB database is composed of many such Storages that are cooperating together behind the scenes.
The I/O behavior we observed is very interesting for RavenDB. The way RavenDB is built is that a single database is actually made up of a central Storage for the data, and separate Storages for each of the indexes you have. That allows us to do split work between different cores, parallelize work, and most importantly, benefit from batching changes to the indexes.
The downside of that is that a single transaction doesn’t cause a single write to the disk but multiple writes. Our test case is the absolute worst-case scenario for the disk, we are making a lot of individual writes to a lot of documents, and there are about 100 indexes active on the database in question.
In other words, at any given point in time, there are many (concurrent) outstanding writes to the disk. We don’t actually care about most of those writers, mind you. The only writer that matters (and is on the critical path) is the database one. All the others are meant to complete in an asynchronous manner and, under load, will actually perform better if they stall (since they can benefit from batching).
The problem is that we are suffering from this situation. In this situation, the writes that the user is actually waiting for are basically stuck in traffic behind all the lower-priority writes. That is quite annoying, I have to say.
The role of the Journal in Voron
The Write Ahead Journal in Voron is responsible for ensuring that your transactions are durable. I wrote about it extensively in the past (in fact, I would recommend the whole series detailing the internals of Voron). In short, whenever a transaction is committed, Voron writes that to the journal file using unbuffered I/O.
Remember that the database and each index are running their own separate storages, each of which can commit completely independently of the others. Under load, all of them may issue unbuffered writes at the same time, leading to congestion and our current problem.
During normal operations, Voron writes to the journal, waits to flush the data to disk, and then deletes the journal. They are never actually read except during startup. So all the I/O here is just to verify that, on recovery, we can trust that we won’t lose any data.
The fact that we have many independent writers that aren’t coordinating with one another is an absolute killer for our performance in this scenario. We need to find a way to solve this, but how?
One option is to have both indexes and the actual document in the same storage. That would mean that we have a single journal and a single writer, which is great. However, Voron has a single writer model, and for very good reasons. We want to be able to process indexes in parallel and in batches, so that was a non-starter.
The second option was to not write to the journal in a durable manner for indexes. That sounds… insane for a transactional database, right? But there is logic to this madness. RavenDB doesn’t actually need its indexes to be transactional, as long as they are consistent, we are fine with “losing” transactions (for indexes only, mind!). The reasoning behind that is that we can re-index from the documents themselves (who would be writing in a durable manner).
We actively considered that option for a while, but it turned out that if we don’t have a durable journal, that makes it a lot more difficult to recover. We can’t rely on the data on disk to be consistent, and we don’t have a known good source to recover from. Re-indexing a lot of data can also be pretty expensive. In short, that was an attractive option from a distance, but the more we looked into it, the more complex it turned out to be.
The final option was to merge the journals. Instead of each index writing to its own journal, we could write to a single shared journal at the database level. The problem was that if we did individual writes, we would be right back in the same spot, now on a single file rather than many. But our tests show that this doesn’t actually matter.
Luckily, we are well-practiced in the notion of transaction merging, so this is exactly what we did. Each storage inside a database is completely independent and can carry on without needing to synchronize with any other. We defined the following model for the database:
Root Storage: Documents
Branch: Index - Users/Search
Branch: Index - Users/LastSuccessfulLogin
Branch: Index - Users/Activity
This root & branch model is a simple hierarchy, with the documents storage serving as the root and the indexes as branches. Whenever an index completes a transaction, it will prepare the journal entry to be written, but instead of writing the entry to its own journal, it will pass the entry to the root.
The root (the actual database, I remind you) will be able to aggregate the journal entries from its own transaction as well as all the indexes and write them to the disk in a single system call. Going back to the bus analogy, instead of each index going to the disk using its own car, they all go on the bus together.
We now write all the entries from multiple storages into the same journal, which means that we have to distinguish between the different entries. I wrote a bit about the challenges involved there, but we got it done.
The end result is that we now have journal writes merging for all the indexes of a particular database, which for large databases can reduce the total number of disk writes significantly. Remember our findings from earlier, bigger writes are just fine, and the disk can process them at GB/s rate. It is the number of individual writes that matters most here.
Writing is not even half the job, recovery (read) in a shared world
The really tough challenge here wasn’t how to deal with the write side for this feature. Journals are never read during normal operations. Usually we only ever write to them, and they keep a persistent record of transactions until we flush all changes to the data file, at which point we can delete them.
It is only when the Storage starts that we need to read from the journals, to recover all transactions that were committed to them. As you can imagine, even though this is a rare occurrence, it is one of critical importance for a database.
This change means that we direct all the transactions from both the indexes and the database into a single journal file. Usually, each Storage environment has its own Journals/ directory that stores its journal files. On startup, it will read through all those files and recover the data file.
How does it work in the shared journal model? For a root storage (the database), nothing much changes. We need to take into account that the journal files may contain transactions from a different storage, such as an index, but that is easy enough to filter.
What about branch storage (an index) recovery? Well, it can probably just read the Journals/ directory of the root (the database), no?
Well, maybe. Here are some problems with this approach. How do we encode the relationship between root & branch? Do we store a relative path, or an absolute path? We could of course just always use the root’s Journals/ directory, but that is problematic. It means that we could only open the branch storage if we already have the root storage open. Accepting this limitation means adding a new wrinkle into the system that currently doesn’t exist.
It is highly desirable (for many reasons) to want to be able to work with just a single environment. For example, for troubleshooting a particular index, we may want to load it in isolation from its database. Losing that ability, which ties a branch storage to its root, is not something we want.
The current state, by the way, in which each storage is a self-contained folder, is pretty good for us. Because we can play certain tricks. For example, we can stop a database, rename an index folder, and start it up again. The index would be effectively re-created. Then we can stop the database and rename the folders again, going back to the previous state. That is not possible if we tie all their lifetimes together with the same journal file.
Additional complexity is not welcome in this project
Building a database is complicated enough, adding additional levels of complexity is a Bad Idea. Adding additional complexity to the recovery process (which by its very nature is both critical and rarely executed) is a Really Bad Idea.
I started laying out the details about what this feature entails:
A database cannot delete its journal files until all the indexes have synced their state.
What happens if an index is disabled by the user?
What happens if an index is in an error state?
How do you manage the state across snapshot & restore?
There is a well-known optimization for databases in which we split the data file and the journal files into separate volumes. How is that going to work in this model?
Putting the database and indexes on separate volumes altogether is also a well-known optimization technique. Is that still possible?
How do we migrate from legacy databases to the new shared journal model?
I started to provide answers for all of these questions… I’ll spare you the flow chart that was involved, it looked something between abstract art and the remains of a high school party.
The problem is that at a very deep level, a Voron Storage is meant to be its own independent entity, and we should be able to deal with it as such. For example, RavenDB has a feature called Side-by-Side indexes, which allows us to have two versions of an index at the same time. When both the old and new versions are fully caught up, we can shut down both indexes, delete the old one, and rename the new index with the old one’s path.
A single shared journal would have to deal with this scenario explicitly, as well as many other different ones that all made such assumptions about the way the system works.
Not my monkeys, not my circus, not my problem
I got a great idea about how to dramatically simplify the task when I realized that a core tenet of Voron and RavenDB in general is that we should not go against the grain and add complexity to our lives. In the same way that Voron uses memory-mapped files and carefully designed its data access patterns to take advantage of the kernel’s heuristics.
The idea is simple, instead of having a single shared journal that is managed by the database (the root storage) and that we need to access from the indexes (the branch storages), we’ll have a single shared journal with many references.
The idea is that instead of having a single journal file, we’ll take advantage of an interesting feature: hard links. A hard link is just a way to associate the same file data with multiple file names, which can reside in separate directories. A hard link is limited to files running on the same volume, and the easiest way to think about them is as pointers to the file data.
Usually, we make no distinction between the file name and the file itself, but at the file system level, we can attach a single file to multiple names. The file system will manage the reference counts for the file, and when the last reference to the file is removed, the file system will delete the file.
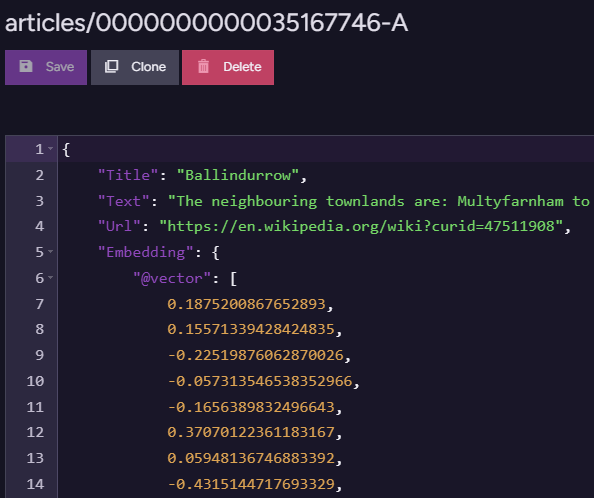
The idea is that we’ll keep the same Journals/ directory structure as before, where each Storage has its own directory. But instead of having separate journals for each index and the database, we’ll have hard links between them. You can see how it will look like here, the numbers next to the file names are the inode numbers, you can see that there are multiple such files with the same inode number (indicating that there are multiple links to the same underlying file)..
With this idea, here is how a RavenDB database manages writing to the journal. When the database needs to commit a transaction, it will write to its journal, located in the Journals/ directory. If an index (a branch storage) needs to commit a transaction, it does not write to its own journal but passes the transaction to the database (the root storage), where it will be merged with any other writes (from the database or other indexes), reducing the number of write operations.
The key difference here is that when we write to the journal, we check if that journal file is already associated with this storage environment. Take a look at the Journals/0015.journal file, if the Users_ByName index needs to write, it will check if the journal file is already associated with it or not. In this case, you can see that Journals/0015.journal points to the same file (inode) as Indexes/Users_ByName/Journals/0003.journal.
What this means is that the shared journals mode is only applicable for committing transactions, there have been no changes required for the reads / recovery side. That is a major plus for this sort of a critical feature since it means that we can rely on code that we have proven to work over 15 years.
The single writer mode makes it work
A key fact to remember is that there is always only a single writer to the journal file. That means that there is no need to worry about contention or multiple concurrent writes competing for access. There is one writer and many readers (during recovery), and each of them can treat the file as effectively immutable during recovery.
The idea behind relying on hard links is that we let the operating system manage the file references. If an index flushes its file and is done with a particular journal file, it can delete that without requiring any coordination with the rest of the indexes or the database. That lack of coordination is a huge simplification in the process.
In the same manner, features such as copying & moving folders around still work. Moving a folder will not break the hard links, but copying the folder will. In that case, we don’t actually care, we’ll still read from the journal files as normal. When we need to commit a new transaction after a copy, we’ll create a new linked file.
That means that features such as snapshots just work (although restoring from a snapshot will create multiple copies of the “same” journal file). We don’t really care about that, since in short order, the journals will move beyond that and share the same set of files once again.
In the same way, that is how we’ll migrate from the old system to the new one. It is just a set of files on disk, and we can just create new hard links as needed.
Advanced scenarios behavior
I mentioned earlier that a well-known technique for database optimizations is to split the database file and the journals into separate volumes (which provides higher overall I/O throughput). If the database and the indexes reside on different volumes, we cannot use hard links, and the entire premise of this feature fails.
In practice, at least for our users’ scenarios, that tends to be the exception rather than the rule. And shared journals are a relevant optimization for the most common deployment model.
Additional optimizations - vectored I/O
The idea behind shared journals is that we can funnel the writes from multiple environments through a single pipe, presenting the disk with fewer (and larger) writes. The fact that we need to write multiple buffers at the same time also means that we can take advantage of even more optimizations.
In Windows, we can use WriteFileGather to submit a single system call to merge multiple writes from many indexes and the database. On Linux, we use pwritev for the same purpose. The end result is additional optimizations beyond just the merged writes.
I have been working on this set of features for a very long time, and all of them are designed to be completely invisible to the user. They either give us a lot more flexibility internallyor they are meant to just provide better performance without requiring any action from the user.
I’m really looking forward to showing the performance results. We’ll get to that in the next post…
The problem was that this took time - many days or multiple weeks - for us to observe that. But we had the charts to prove that this was pretty consistent. If the RavenDB service was restarted (we did not have to restart the machine), the situation would instantly fix itself and then slowly degrade over time.
The scenario in question was performance degradation over time. The metric in question was the average request latency, and we could track a small but consistent rise in this number over the course of days and weeks. The load on the server remained pretty much constant, but the latency of the requests grew.
That the customer didn’t notice that is an interesting story on its own. RavenDB will automatically prioritize the fastest node in the cluster to be the “customer-facing” one, and it alleviated the issue to such an extent that the metrics the customer usually monitors were fine. The RavenDB Cloud team looks at the entire system, so we started the investigation long before the problem warranted users’ attention.
I hate these sorts of issues because they are really hard to figure out and subject to basically every caveat under the sun. In this case, we basically had exactly nothing to go on. The workload was pretty consistent, and I/O, memory, and CPU usage were acceptable. There was no starting point to look at.
Those are also big machines, with hundreds of GB of RAM and running heavy workloads. These machines have great disks and a lot of CPU power to spare. What is going on here?
After a long while, we got a good handle on what is actually going on. When RavenDB starts, it creates memory maps of the file it is working with. Over time, as needed, RavenDB will map, unmap, and remap as needed. A process that has been running for a long while, with many databases and indexes operating, will have a lot of work done in terms of memory mapping.
In Linux, you can inspect those details by running:
Here you can see the first page of entries from this file. Just starting up RavenDB (with no databases created) will generate close to 2,000 entries. The smaps virtual file can be really invaluable for figuring out certain types of problems. In the snippet above, you can see that we have some executable memory ranges mapped, for example.
The problem is that over time, memory becomes fragmented, and we may end up with an smaps file that contains tens of thousands (or even hundreds of thousands) of entries.
Here is the result of running perf top on the system, you can see that the top three items that hogs most of the resources are related to smaps accounting.
This file provides such useful information that we monitor it on a regular basis. It turns out that this can have… interesting effects. Consider that while we are running the scan through all the memory mapping, we may need to change the memory mapping for the process. That leads to contention on the kernel locks that protect the mapping, of course.
It’s expensive to generate the smaps file
Reading from /proc/[pid]/smaps is not a simple file read. It involves the kernel gathering detailed memory statistics (e.g., memory regions, page size, resident/anonymous/shared memory usage) for each virtual memory area (VMA) of the process. For large processes with many memory mappings, this can be computationally expensive as the kernel has to gather the required information every time /proc/[pid]/smaps is accessed.
When /proc/[pid]/smaps is read, the kernel needs to access memory-related structures. This may involve taking locks on certain parts of the process’s memory management system. If this is done too often or across many large processes, it could lead to contention or slow down the process itself, especially if other processes are accessing or modifying memory at the same time.
If the number of memory mappings is high, and the frequency with which we monitor is short… I hope you can see where this is going. We effectively spent so much time running over this file that we blocked other operations.
This wasn’t an issue when we just started the process, because the number of memory mappings was small, but as we worked on the system and the number of memory mappings grew… we eventually started hitting contention.
The solution was two-fold. We made sure that there is only ever a single thread that would read the information from the smaps (previously it might have been triggered from multiple locations). We added some throttling to ensure that we aren’t hammering the kernel with requests for this file too often (returning cached information if needed) and we switched from using smaps to using smaps_rollup instead. The rollup version provides much better performance, since it deals with summary data only.
With those changes in place, we deployed to production and waited. The result was flat latency numbers and another item that the Cloud team could strike off the board successfully.